
DIMAG
 L’objectif essentiel du projet à long terme est le développement de l’Atlas maritime interactif numérique de l’histoire (DIMAG). Il s’agit d’un outil de recherche basé sur le web, mis en œuvre sous forme de WebGIS (système d’information géographique). Cet outil permet d’une part de simuler des liaisons maritimes avec une précision remarquable en combinant des algorithmes de routage, des données météorologiques et des données de performance, entre autres de la reconstruction 1:1 de type Laurons II. Ces itinéraires calculés sont représentés dans le WebGIS via une carte géoréférencée (similaire à Google Maps), l’espace et le temps étant limités à la Méditerranée et à l’Empire romain dans la première phase de financement. D’autre part, les données de la simulation d’itinéraire peuvent être présentées et mises en relation par des historiens ou des amateurs intéressés avec des données de recherche géoréférencées, telles que des phares, des amphores, des points de navigation, des matières premières, des marchandises ou des produits, déposées dans une base de données ou dans l’environnement de base de données FuD et collectées par le domaine de projet « Recherche historique » pour une analyse plus approfondie, afin d’entreprendre des études plus approfondies sur l’économie romaine, la connectivité maritime et en particulier le commerce maritime romain, sur la base des données de recherche et des informations sur les itinéraires collectées. DIMAG constitue ainsi un instrument de recherche complet dont la précision dépasse largement les approches précédentes comme ORBIS.
L’objectif essentiel du projet à long terme est le développement de l’Atlas maritime interactif numérique de l’histoire (DIMAG). Il s’agit d’un outil de recherche basé sur le web, mis en œuvre sous forme de WebGIS (système d’information géographique). Cet outil permet d’une part de simuler des liaisons maritimes avec une précision remarquable en combinant des algorithmes de routage, des données météorologiques et des données de performance, entre autres de la reconstruction 1:1 de type Laurons II. Ces itinéraires calculés sont représentés dans le WebGIS via une carte géoréférencée (similaire à Google Maps), l’espace et le temps étant limités à la Méditerranée et à l’Empire romain dans la première phase de financement. D’autre part, les données de la simulation d’itinéraire peuvent être présentées et mises en relation par des historiens ou des amateurs intéressés avec des données de recherche géoréférencées, telles que des phares, des amphores, des points de navigation, des matières premières, des marchandises ou des produits, déposées dans une base de données ou dans l’environnement de base de données FuD et collectées par le domaine de projet « Recherche historique » pour une analyse plus approfondie, afin d’entreprendre des études plus approfondies sur l’économie romaine, la connectivité maritime et en particulier le commerce maritime romain, sur la base des données de recherche et des informations sur les itinéraires collectées. DIMAG constitue ainsi un instrument de recherche complet dont la précision dépasse largement les approches précédentes comme ORBIS.
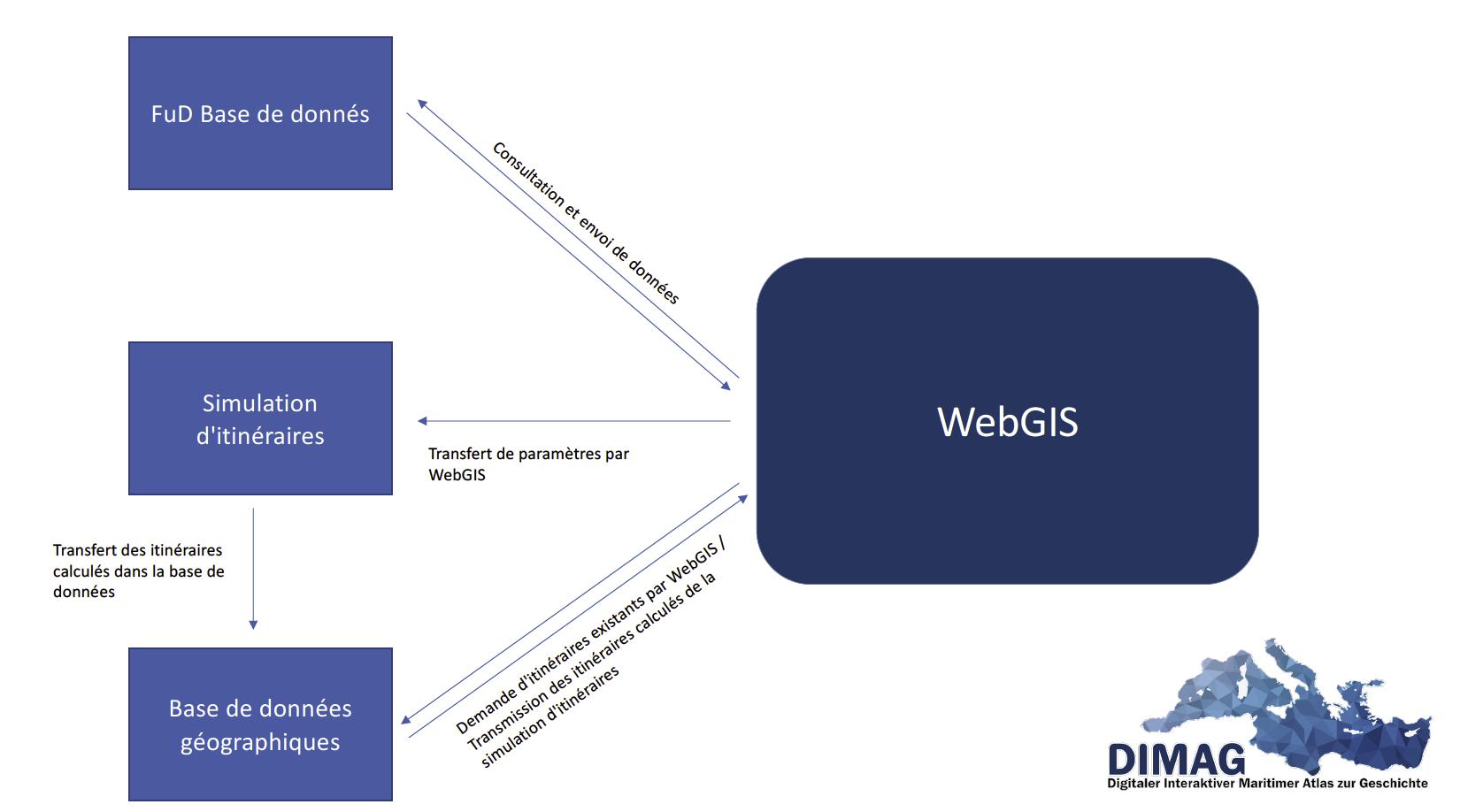
Structure générale de DIMAG en tant qu’outil de recherche
WebGIS
Le WebGIS est la partie visible de l’outil de recherche. Les utilisateurs de DIMAG peuvent y demander des liaisons maritimes en fonction du point de départ et de la destination, du navire à utiliser et de l’heure de départ du voyage. Si l’utilisateur fait une demande de liaison routière, le SIG Web demande d’abord à la base de données géographiques si les simulations de route correspondantes sont déjà disponibles, c’est-à-dire si des fichiers .gpx sont déjà disponibles pour cette demande. S’ils sont disponibles, ils sont directement édités et visualisés pour l’utilisateur sur l’interface WebGIS. Si les itinéraires n’ont pas encore été calculés, le SIG Web transmet les paramètres au logiciel de simulation d’itinéraires, qui constitue le backend de l’outil de recherche. Le logiciel de simulation calcule tous les itinéraires et les transmet ensuite à la base de données géographiques, qui transmet à son tour les informations au SIG Web.
Outre les simulations d’itinéraires, les utilisateurs de l’outil de recherche sélectionnent via le WebGIS les données historiques de recherche qu’ils souhaitent visualiser sur l’interface SIG pour une analyse plus approfondie. Selon la catégorie demandée, les données sont ensuite chargées et présentées dans le SIG à partir de la base de données de recherche R&D séparée. En cliquant sur les points de données ou en sélectionnant la liste affichée en parallèle, il est possible d’obtenir des informations spécifiques supplémentaires.
Le WebGIS est développé à l’aide du framework Angular et d’OpenStreetMaps.
Simulation d’itinéraires
Le logiciel de simulation d’itinéraires est un élément essentiel de l’outil DIMAG. C’est ici que convergent les résultats de recherche issus de la collecte et de l’analyse des données, des reconstructions et de la recherche historique de fond. Le logiciel de simulation fonctionne en plusieurs instances pour un accès parallèle des utilisateurs sur un environnement de serveur et est relié par des scripts à la base de données géographiques et au WebGIS. Les demandes des utilisateurs du WebGIS qui n’ont pas encore été simulées sont transmises au logiciel de simulation en tant que paramètres. Celui-ci calcule alors tous les itinéraires disponibles (c’est-à-dire toutes les variantes d’itinéraires permettant d’atteindre la destination) à l’aide du diagramme polaire du type de bateau sélectionné, des données météorologiques mises à disposition par la NOAA pour les années 1990-2010 – celles-ci se rapprochent le plus de celles de l’époque impériale en raison des conditions climatiques similaires – ainsi que du moment de navigation choisi et transmet les données enregistrées sous forme de fichier .gpx à la base de données géographique.
Le cœur de la simulation de route est le programme OpenCPN, écrit en C++, qui a été et sera adapté de fond en comble. Développé à l’origine comme client de bureau par des navigateurs passionnés, le programme a d’abord été analysé en profondeur et tous les éléments du programme qui n’étaient pas nécessaires ont été supprimés. L’élément le plus important est la fonction de routage d’OpenCPN, qui a ensuite été séparée de l’interface graphique du programme et portée sous forme de programme en ligne de commande pour Linux. Comme le logiciel de simulation d’itinéraires dans DIMAG fonctionnera sur un serveur Linux, cette étape était essentielle pour l’automatisation prévue des demandes d’itinéraires par les utilisateurs de DIMAG.
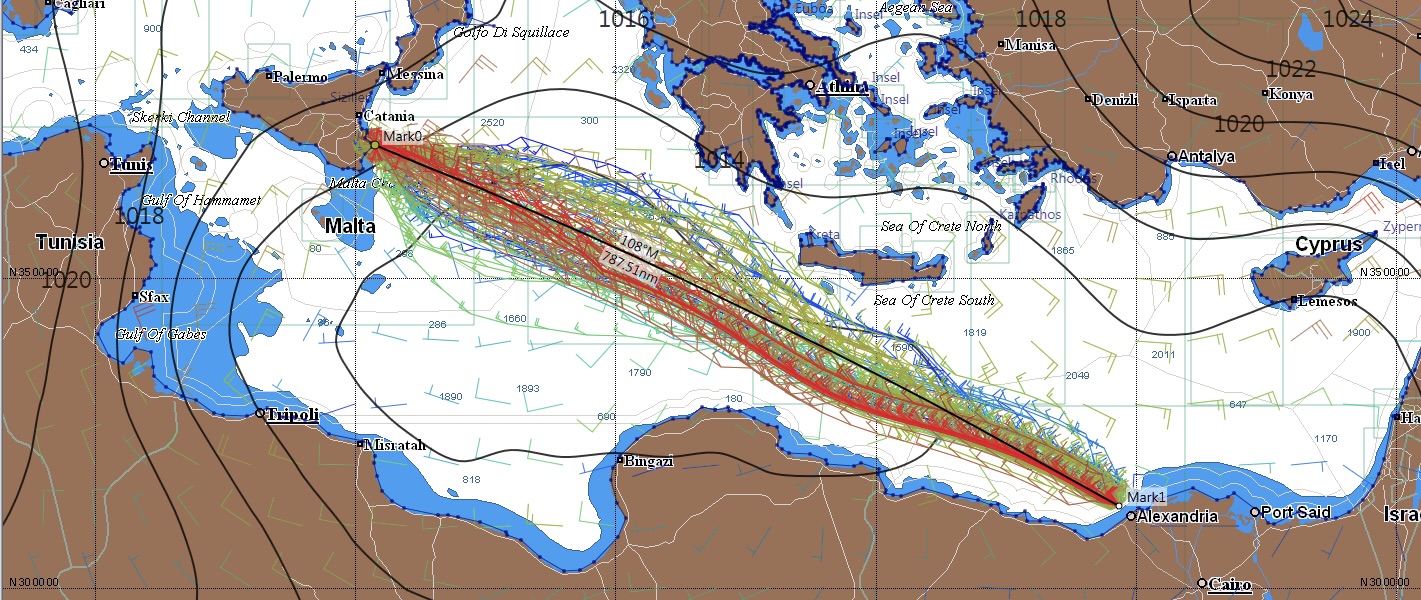
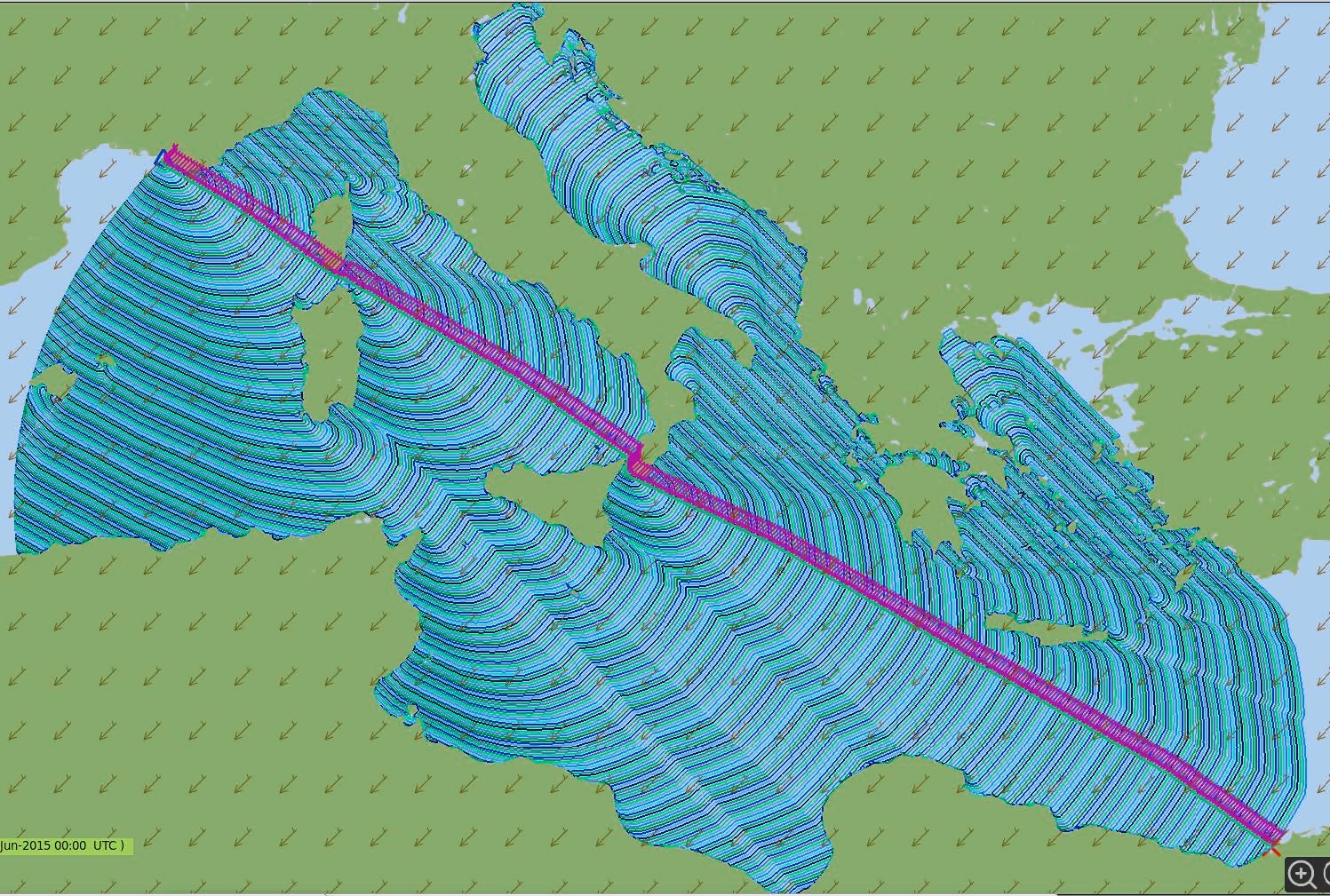 Exemple de représentation issue d’OpenCPN pour le calcul d’itinéraire avec isochrones de la route Marseille – Alexandrie
Exemple de représentation issue d’OpenCPN pour le calcul d’itinéraire avec isochrones de la route Marseille – Alexandrie
Le programme de simulation calcule les routes et les temps de navigation en utilisant ce que l’on appelle des isochrones. Cela signifie qu’à partir du point de départ, le programme suit toutes les routes possibles à partir du bateau virtuel (c’est-à-dire en fonction du diagramme polaire du bateau et des conditions de vent existantes à ce moment-là) pendant un intervalle de temps fixe, par exemple pendant une heure. Dans l’itération suivante, tous les cours possibles sont à nouveau calculés à partir des points extérieurs atteints dans le temps. Cette procédure est exécutée jusqu’à ce que la cible se trouve « à l’intérieur » d’un isochrone – ou que la procédure soit interrompue avant, faute de faisabilité de la liaison, par exemple en raison de mauvaises conditions de vent.
Grâce à cette approche, on obtient d’une part tous les itinéraires réellement possibles à ce moment-là, mais en même temps, un filtrage important du trajet est nécessaire pour éviter les connexions isochrones inutiles et chronophages (voir l’image pour un exemple de calcul d’itinéraire). Pour la liaison Marseille-Alexandrie, les liaisons isochrones qui mènent finalement à Majorque, à la Croatie ou à la Turquie ne sont certainement pas pertinentes.
Les liaisons isochrones qui ont atteint le point d’arrivée sont exportées par le programme sous forme de fichier .gpx collecté et transférées à la base de données géographiques. Ainsi, pour une période donnée, toutes les routes navigables sont enregistrées ensemble et disponibles. Si un autre utilisateur de DIMAG demande à nouveau la même liaison d’itinéraire pour la même période d’interrogation, une logique d’interrogation au sein du SIG Web reconnaît que les données sont déjà disponibles dans la géodatabase – un nouveau calcul n’est donc plus nécessaire. De cette manière, la géodatabase des itinéraires calculés par DIMAG est constamment enrichie par les requêtes des utilisateurs ; le temps de calcul et donc d’attente pour les utilisateurs est donc constamment réduit.
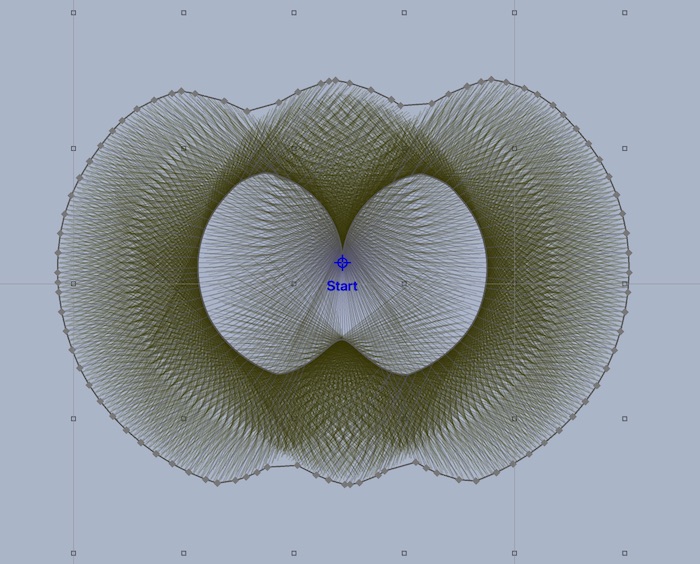
Exemple de représentation de la méthode isochrone, ici dans la deuxième itération. Seuls les points les plus éloignés de la première itération ou du point de départ sont intéressants pour le calcul de l’itinéraire. Source de l’image : https://routing.luckgrib.com/intro/isochrones/img/iso second as iso.jpeg
Conception de la base de données
Pour la mise à disposition des données, DIMAG utilise deux bases de données différentes, qui sont hébergées avec le reste de l’architecture DIMAG sur le même environnement serveur. On peut distinguer la base de données de recherche FuD, dans laquelle sont surtout mises à disposition des données géoréférencées issues du domaine de projet de la recherche historique, ainsi qu’une base de données géographiques, dans laquelle sont enregistrées les simulations de routine.
Base de données de recherche FuD
![]() La base de données « Réseau de recherche et système de base de données (FuD) », qui existe depuis 2004 à l’Université de Trèves et qui est soutenue par la Deutsche Forschungsgemeinschaft DFG, constitue un environnement de recherche virtuel pour les sciences humaines et sociales. Le logiciel modulaire représente l’ensemble du processus de recherche et soutient le travail de recherche collaboratif indépendamment du temps et du lieu. La R&D offre une multitude d’outils pour la collecte, l’annotation, l’analyse et le traitement des données, jusqu’à la publication et l’archivage.
La base de données « Réseau de recherche et système de base de données (FuD) », qui existe depuis 2004 à l’Université de Trèves et qui est soutenue par la Deutsche Forschungsgemeinschaft DFG, constitue un environnement de recherche virtuel pour les sciences humaines et sociales. Le logiciel modulaire représente l’ensemble du processus de recherche et soutient le travail de recherche collaboratif indépendamment du temps et du lieu. La R&D offre une multitude d’outils pour la collecte, l’annotation, l’analyse et le traitement des données, jusqu’à la publication et l’archivage.
Le cœur de FuD est une base de données MySQL, qui peut être utilisée à l’aide d’une interface graphique. interface JSON (Elastic-Search-Index) communique avec le WebGIS. Dans DIMAG, de nombreux jeux de données géoréférencées sont stockés et mis à disposition en R&D, notamment des ports, des marchandises, des produits, des données d’amphores, des phares, etc.
Pour plus d’informations sur la R&D, consultez le site : https://fud.uni-trier.de/
Banque de données géographiques
DIMAG enregistre les simulations d’itinéraires précalculées et demandées dans une géodatabase configurée à cet effet. Celle-ci est basée sur PostgreSQL. Une interface entre la base de données et le SIG Web garantit que les itinéraires déjà calculés et enregistrés dans la base de données géographiques ne sont pas transmis une nouvelle fois au logiciel de simulation en tant qu’ordre, mais sont directement transmis de la base de données au SIG Web.

{kind=link}